Stella GNSS Simulator
The Stella GNSS Simulator is the new generation of multi-constellation and multi-frequency RF simulators. With its user experience-focused design, the Stella GNSS Simulator simplifies each step of the simulation process for a smooth and intuitive use.
Scalable configuration
High precision
Closed-loop and open-loop mode
Intuitive graphical interface
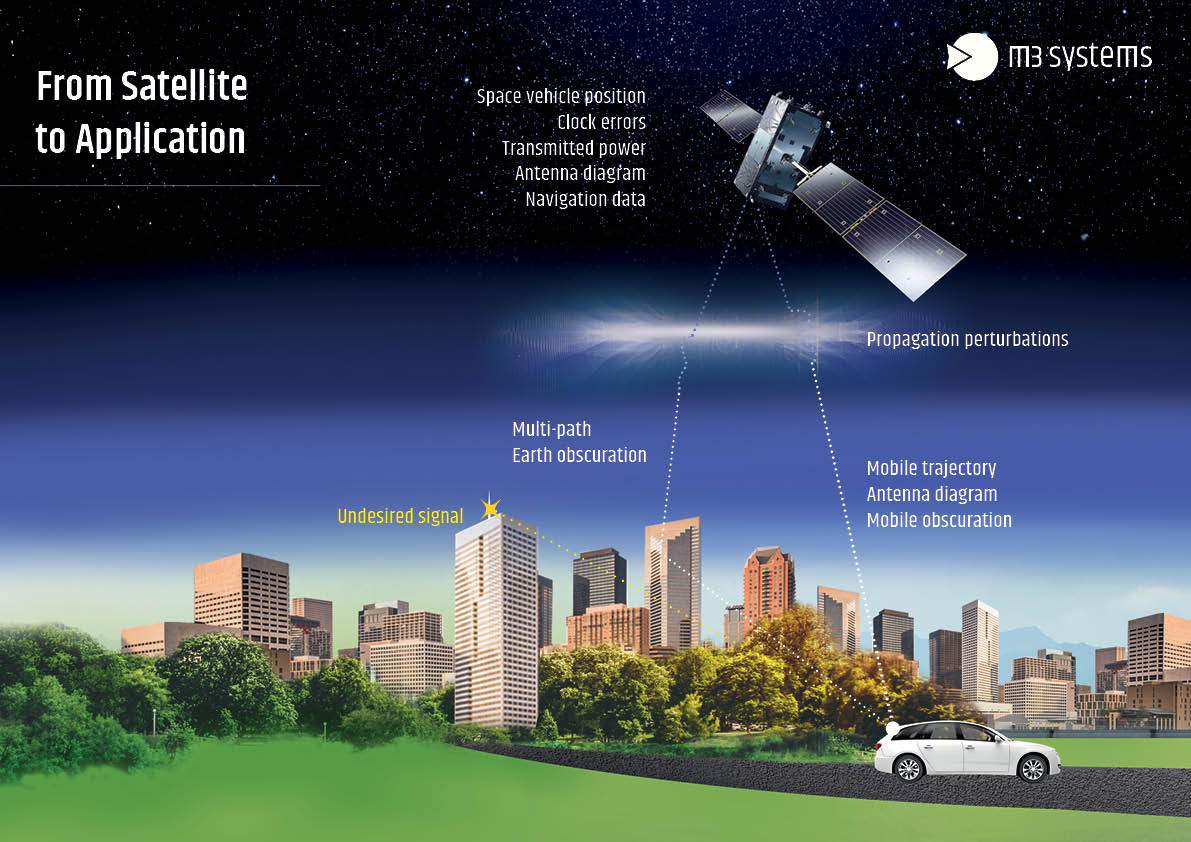
Reproduce the sky reliably, integrally, and accurately
An all-in-one GNSS simulator
The Stella GNSS Simulator is an essential tool at every stage of your project, whether it’s design, development, or validation.
Featuring an intuitive and simplified user interface, our all-in-one GNSS simulator streamlines testing and validating your GNSS receivers by generating GNSS signals.
Stella GNSS Simulator lets you focus on what matters most: the success of your project.
Interference simulation
Simulation of intentional and unintentional interferences such as jamming and spoofing
Multi-antenna
Simulation of 4 antennas simultaneously
High precision
Ground station and RTCM3 message frames compliant with RTCM3 standard
Multipath
Generation of multipath models using a user-defined 3D model