M3 Systems and Tilt Consulting have jointly submitted the SaNGENE project in the context of myEUspace competition 2021 organised by EUSPA.
SaNGENE stands for Sens And Nav on GNSS Environment Estimation. The project aims at demonstrating the concept of an integrated GNSS based passive radar for detection and first localization of obstacles.
1.1 Customer needs and competitive landscape
Transponders using secondary radars are the most commonly used means for mutual identification and localization of certified aeronautical platforms (IFF, TCAS, ADS-B, …). FLARM like radio devices also allow GPS positions to be exchanged between platforms that are equipped with them.
Although they are widely used, these means do not make it possible to deal with the case of non-equipped or uncooperative mobiles, as certain categories of drones can however be, source of danger for other carriers beyond their flight height and corridor.
Radar or optical detection systems are also envisaged, but rather as part of fixed ground infrastructure for the protection of sensitive sites, this because of the size and cost of such equipment.
In the context of this solution, we sought passive radar type solutions, based on GNSS signals, capable of measuring arrival time and integrated into naturally available navigation equipment on board :
- without involving collaborative / cooperative infrastructures (identifier + location envisaged by the drone regulations…. type ADS-B / TCAS or UTM) that could only be deployed in the long term, and not necessarily on all types of drones.
- not relying on the presence of hypothetical transmitters on drones (COM, LOC, …)
This ability to detect and locate obstacles must be thought in the light of the low reflection index of the obstacles and the low level of reception of the reflected signals after illumination by the GNSS signals.
1.2 Description of the solution
This breakthrough relates to equipment for the detection and first localization of obstacles located near to a carrier (AUV, light A/C, glider,.) in order to allow its subsequent avoidance.
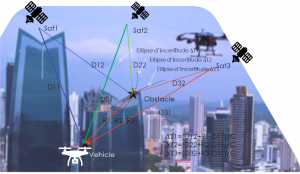
The principle consists in using existing radio sources for illumination of obstacles, when these signals have a wide availability in space and in time, in order to allow the detection and the localization of nearby obstacles from reflected signals. This passive detector principle (without dedicated transmission) finds its full effectiveness with GNSS signals which presents deterministic time and frequency structures, are synchronized with one another and referenced in space (known positions of the transmitting satellites). The localization method is based on the principle of multistatic radar to detect and locate nearby obstacles.
GNSS signals can indeed be considered as opportunity signals (SoO) for obstacle detection, GNSS satellites behaving like sources of radar signals, which positions are known at all times, and almost always available.
All the GNSS constellations provide multiple sources of synchronous and coherent signals, and a variety of reception frequencies, which offer a significant diversity of reception conditions, likely to increase the availability and the accuracy of the relative localization, but also to obtain a multidimensional « perception » of the environment, such as obstacles or 3D relief around.
The advantage of this solution lies in the simplicity of estimating the delay between the direct and reflected signals, carried out here by simple intercorrelation of the signal received on a single punctual antenna (receiving both the direct and its delayed echo), with the local reference code.
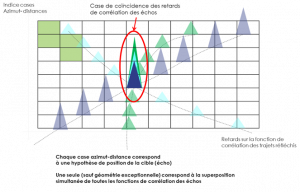
The space surrounding the position of the carrier is broken down into azimuth-distance cells, compatible with the resolution of the spatial correlation function of the code of the GNSS signal used. One calculates for each of the satellite in-view the intercorrelation between the received signal and a delayed copy compared to the direct of the echo which would be reflected in the centre of the cell, and one adds the powers of intercorrelation on the set of signals.
As such, the solution provides in a single low-cost equipment both the PNT capabilities and the detection capabilities of the nearby obstacles, without modifying fundamentally the architecture of the GNSS receiver architecture (SDR based).
As such, the solution uses the classical GNSS correlator engine resources, augmented by additional detection/location capabilities of the mobiles/ obstacles, without neither modifying the receiver architecture nor significantly increasing its complexity, the modifications being mainly at software level.
An expected advantage of this approach is that it makes it possible to supplement the localization capacity of GNSS devices with a close obstacle/ target detection capacity, on the basis of the same signals and within the same receiver.
An alternative or complement to GNSS signals could be to use the ranging signals transmitted by the constellation of LEOs constellations, that could be used for consolidating the GNSS based obstacle detections.
1.3 Galileo and/or Copernicus relevance
Usage of GNSS for target or obstacle detection and localisation is not new, but faces difficulties linked to the low power of received GNSS signal power together with poor autocorrelation level separation between standard GPS signals (codes intercorrelation levels).
To that aim, the present approach implements a solution to extend the field of operation by adaptatively reducing the contribution of the residual correlation secondaries existing between the local signal and the direct signal for each of the monitored azimuth-distance pads.
Furthermore, Galileo signals offer extended features that let expected further improvement for such a passive radar approach, that I promote in the frame of autonomous vehicles, especially for drones’ area.
It can be shown that the residual level of the secondaries of the signals’ autocorrelation function is an important difficulty to the use of the principle. The longer code duration (pilot channel) and wider bandwidth of the PRN code of Galileo signals will deeply contribute to the separation of the direct and reflected signal mandatory for improving the sensibility of the detection of the echoes.
Therefore, the proposed innovation also takes great advantage of the structure of Galileo signals (together with other constellations with similar signals) which shows extended code bandwidth (E5a & E5b, or E6) and code lengths (for example the pilot channel), offering a significant spatial separation of the correlation function, as well as a level of direct-reflected intercorrelation significantly lower than signals of previous constellations (GPS, Glonass). This super-resolution of the Galileo signals allows better isolation and spatial localization of obstacles as well as a greater sensitivity of detection allowing to expect detection ranges of some hundreds of meters.
1.4 Innovation potential
Transponders using secondary radars are the most commonly used means for mutual identification and localization of certified aeronautical platforms (IFF, TCAS, ADS-B, …). FLARM like radio devices also allow GPS positions to be exchanged between platforms that are equipped with them.
Although they are widely used, these means do not make it possible to deal with the case of non-equipped or uncooperative mobiles, as certain categories of drones can however be, source of danger for other carriers beyond their flight height and corridor.
Radar or optical detection systems are also envisaged, but rather as part of fixed ground infrastructure for the protection of sensitive sites, this because of the size and cost of such equipment.
In the context of this solution, we sought passive radar type solutions, based on GNSS signals, capable of measuring arrival time and integrated into naturally available navigation equipment on board:
- without involving collaborative / cooperative infrastructures (identifier + location envisaged by the drone regulations…. type ADS-B / TCAS or UTM) that could only be deployed in the long term, and not necessarily on all types of drones.
- not relying on the presence of hypothetical transmitters on drones (COM, LOC, …)
This ability to detect and locate obstacles must be thought in the light of the low reflection index of the obstacles and the low level of reception of the reflected signals after illumination by the GNSS signals.